| spanish.china.org.cn | 18. 03. 2026 | Editor:Teresa Zheng |  |
 |
 |
 |
 |
[A A A] |
El primer robot humanoide tenista autónomo del mundo, desarrollado en China, recibe un "me gusta" de Elon Musk
Un equipo de robótica de Beijing ha desarrollado el primer robot humanoide tenista completamente autónomo del mundo, lo que ha provocado que Elon Musk reenvíe el vídeo donde aparece y le dé un "me gusta" en X. Este avance marca un salto desde el manejo de golpes individuales hasta el dominio de la dinámica de un partido completo, lo que indica un cambio del juego asistido por máquinas a la aparición de un auténtico "contrincante" en la cancha, según informes de medios de comunicación.
El vídeo del robot humanoide de desarrollo chino jugando al tenis fue publicado en X el domingo y fue reenviado y recibió un "me gusta" de Elon Musk el lunes con un breve comentario "yeah", acumulando un total de 8.600 "me gusta" y provocando una amplia atención y debate.
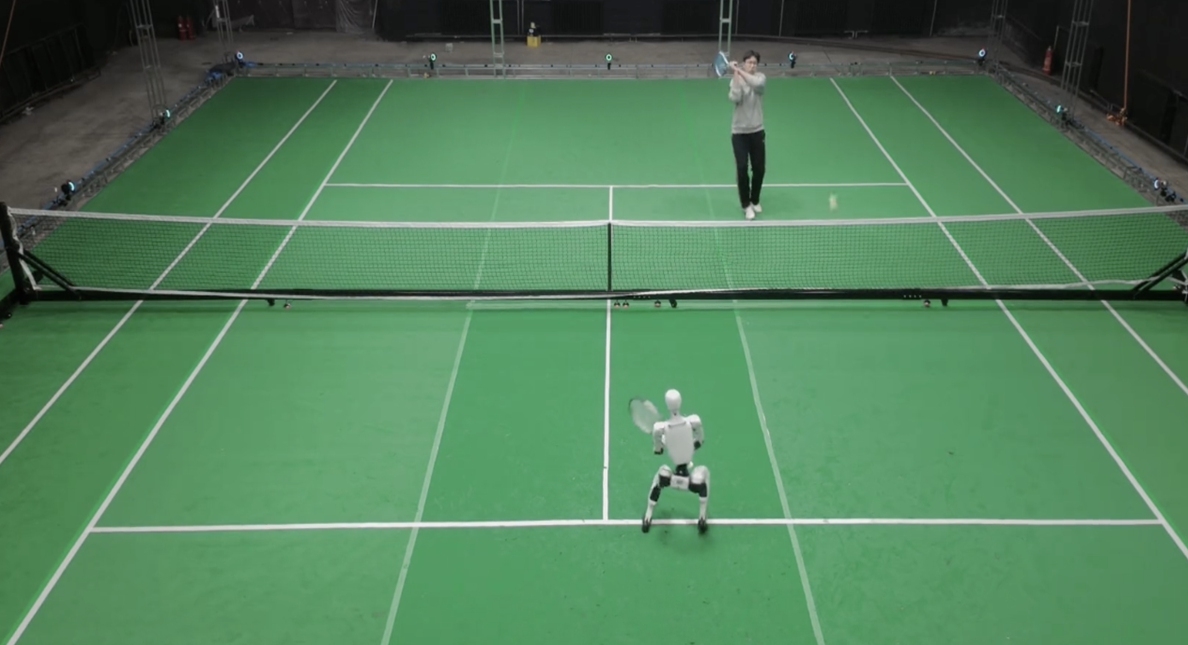
El robot humanoide tenista, desarrollado por Galbot, puede ajustar rápidamente su juego de pies y posicionamiento, coordinar los movimientos de la parte superior e inferior del cuerpo para ejecutar golpes y devolver los tiros con precisión a objetivos designados, como muestra el vídeo.
Puede adaptar continuamente su postura y sincronización para manejar una variedad de pelotas entrantes, lo que permite intercambios de golpes sostenidos con jugadores de diferentes niveles de habilidad, según un comunicado de Galbot.
En un deporte tan dinámico y de confrontación como el tenis, el robot es capaz de responder a pelotas que viajan a altas velocidades, trayectorias impredecibles y ritmos de juego en constante cambio, lo que demuestra capacidades avanzadas de percepción, control y toma de decisiones en tiempo real, según el comunicado.
Lo que es más importante, esta capacidad no se basa en movimientos preprogramados, sino que se adquiere de forma autónoma mediante el aprendizaje por refuerzo profundo, lo que marca la primera realización a nivel mundial de un rally de tenis de alta dinámica a través de un robot humanoide. Este avance representa un cambio fundamental de la "replicación de movimientos mecánicos" a una "respuesta inteligente basada en decisiones", según el comunicado.
El tenis está ampliamente considerado como una de las pruebas más exigentes para los robots humanoides. Galbot ha desarrollado el primer algoritmo de control inteligente en tiempo real para todo el cuerpo del mundo, adaptado para el juego del tenis, que permite una respuesta rápida y una postura estable en condiciones de alta velocidad. Durante rallies de varios minutos, el robot puede moverse por una pista de tamaño completo, tomar decisiones autónomas y ejecutar golpes precisos. Actúa con compostura contra oponentes de diferentes edades y estilos de juego, manejando con soltura tanto devoluciones de un solo golpe como el control de toda la pista, según declaraciones de un empleado de Galbot.
La empresa también ha presentado un nuevo marco de investigación, LATENT, un novedoso enfoque de aprendizaje motor para robots que permite a los robots humanoides adquirir habilidades de movimiento complejas a partir de datos de movimiento humano imperfectos. El método permite al robot ejecutar golpes de tenis altamente dinámicos y ágiles y competir en el mundo real, avanzando aún más en la frontera de la inteligencia incorporada, según Galbot.
Expertos chinos señalaron que este avance demuestra que la inteligencia artificial incorporada está entrando en la validación en el mundo real en escenarios altamente dinámicos, sirviendo el tenis como punto de referencia para la inteligencia humanoide de propósito general. Se trata de un cambio de la replicación de movimientos a sistemas basados en decisiones que integran la percepción, la planificación y el control, afirmaron.
Liu Dingding, analista de internet con sede en Beijing declaró el martes que este avance sugiere que los robots humanoides tienen el potencial de llegar a los hogares y a sectores como la industria, la agricultura y la manufactura, a medida que adquieran la capacidad de manejar tareas complejas basadas en escenarios.
"Se trata de un gran avance para la robótica, así como para las capacidades manufactureras y tecnológicas de China", afirmó.
Añadió que los efectos indirectos podrían ser significativos, ya que los avances en el control dinámico y el aprendizaje a partir de datos imperfectos pueden reducir los costes de entrenamiento y mejorar la escalabilidad, acelerando las aplicaciones en escenarios industriales, de automatización y de servicios.